 português
português English
English français
français Deutsch
Deutsch русский
русский español
español العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt



ligue-nos agora
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.

considerando que a densidade atual de robôs industriais na indústria de manufatura global é 55, enquanto a densidade de da China robôs industriais tem apenas 21, o que é muito menor do que a de países desenvolvidos como Japão, Coreia do Sul, Alemanha e Estados Unidos e, no contexto da manufatura inteligente, a política de "máquina substituição" continua a ser implementado. ainda há muito espaço para crescimento. empresas de conceito relacionado, como Inovance Tecnologia, robótica, Zhiyun Co., Ltd., Keyuan Co., Ltd. e Qinchuan máquina-ferramenta alcançará um melhor desenvolvimento sob o robô dividendo.
A fase de desenvolvimento de robôs industriais
O desenvolvimento de robôs industriais geralmente pode ser dividido em três gerações:
1. primeira geração de robôs industriais:
geralmente se refere ao “programável robôs industriais ” que atualmente são comercializados e utilizados internacionalmente, também conhecidos como “ensino e reproduzindo robôs industriais ”, ou seja, para que o robô industrial conclua determinada tarefa, o operador deverá primeiro concluir a tarefa. todos os tipos de conhecimento (como trajetória de movimento, condições de operação, sequência de operação e tempo de operação, etc.) de robôs industriais podem ser "ensinados" por meios diretos ou indiretos. depois que os robôs industriais memorizam esse conhecimento, eles pode "reproduzir" As instruções, dentro de um determinado intervalo de precisão, reproduzem fielmente várias ações ensinadas repetidamente. em 1962, o primeiro Unimate robô industrial de automação universal dos estados unidos foi colocado em uso em motores em geral dos estados unidos, marcando o nascimento da primeira geração de robôs industriais.
2, segunda geração de robôs industriais:
geralmente se refere a um "inteligente robô" com algum tipo de inteligência (como como toque, força, visão, etc.). Isso ou seja, após os sensores receberem informações como toque, força e visão, o computador controla o robô máquina em operação para concluir as operações apropriadas correspondentes. em 1982, a General Motors nos estados unidos equipou o robô industrial com um sistema de visão na linha de montagem, anunciando o advento de uma nova geração de robôs industriais inteligentes.
3, terceira geração de robôs industriais:
é o denominado "robô industrial de tipo único". não só tem uma função de percepção, mas também tem certas tomadas de decisão e planejamento capacidades. A primeira geração de robôs industriais ainda está em fase de pesquisa em laboratório. após o nascimento-crescimento-maturidade período, os robôs industriais tornaram-se equipamentos essenciais indispensáveis na indústria de manufatura. existem cerca de 750.000 robôs industriais no mundo lutando lado a lado com trabalhadores e amigos em todas as linhas de produção.
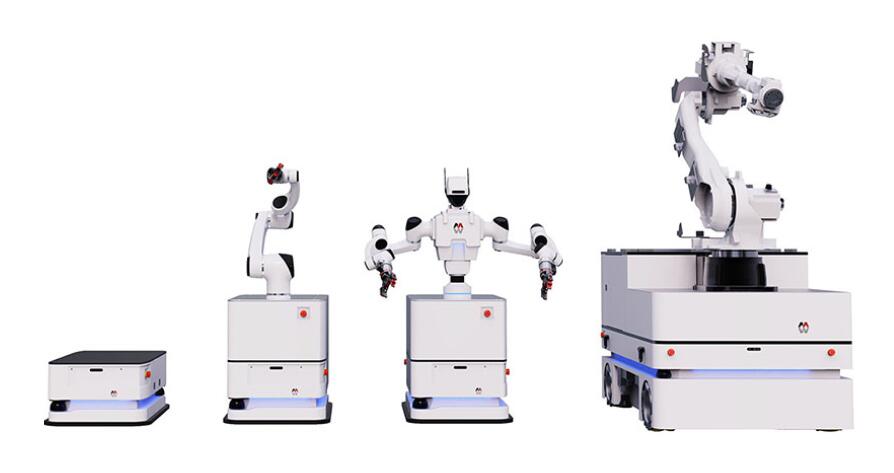
como uma estrela em ascensão da família dos robôs, os robôs especiais tendem a vir para trás devido a seus ampla gama de usos. robôs especiais para diversos fins, como robôs humanóides, robôs agrícolas, robôs de serviço , robôs subaquáticos, robôs médicos, robôs militares e robôs de entretenimento surgiram, E está se movendo em direção a praticidade em um ritmo rápido.
classificação de robôs industriais
robôs industriais podem ser divididos em os seguintes tipos de acordo com métodos diferentes
1. robôs industriais são divididos em as seguintes categorias de acordo com a forma de coordenadas do manipulador: (A forma de coordenada refere-se à forma do sistema de coordenadas de referência obtido pelo braço do manipulador quando ele está em movimento.)
(1) robô industrial coordenado cartesiano
a sua parte de movimento é composta por três movimentos lineares perpendiculares (nomeadamente PPP) e o seu espaço de trabalho é rectangular. sua distância de movimento em cada eixo pode ser lida diretamente em cada eixo de coordenada. é intuitivo, fácil de programar e calcular a posição e postura, possui alta precisão de posicionamento, sem controle de acoplamento, estrutura simples, mas o corpo ocupa um grande espaço. A amplitude de movimento é pequena, a flexibilidade é ruim e é difícil coordenar com outros robôs industriais.
(2) robô industrial de coordenada cilíndrica
sua forma de movimento é realizada por um sistema de movimento composto por uma rotação e dois movimentos. seu espaço de trabalho é cilíndrico. em comparação com o robô industrial de coordenadas retangulares, nas mesmas condições de espaço de trabalho, o corpo ocupa um pequeno volume. A amplitude de movimento é grande e sua precisão de posição perde apenas para os robôs de coordenadas cartesianas e é difícil de coordenar com outros robôs industriais.
(3) robô industrial com coordenada esférica
também conhecido como robô industrial de coordenadas polares, seu movimento de braço consiste em duas rotações e um movimento linear (ou seja, RRP, uma rotação, um movimento de inclinação e um telescópico ). seu espaço de trabalho é uma esfera, que pode fazer movimentos de pitching para cima e para baixo. E ele pode agarrar a peça de trabalho coordenada no solo ou ensinar a posição baixa, sua precisão de posição é alta e o erro de posição é proporcional ao comprimento do braço.
(4) Multi-junta robô industrial
também conhecido como robô industrial de coordenada rotativa. O braço deste robô industrial é semelhante ao membro superior de um corpo humano. suas três primeiras juntas são a junta giratória (RRR). O robô industrial é geralmente composto de uma coluna e um braço grande e um pequeno. A coluna e o grande braço são formados, uma articulação do cotovelo é formada entre a articulação do ombro, o braço e o antebraço, o que pode fazer o braço girar e lançar e balançar, e o antebraço pode fazer o arremesso sua estrutura é a mais compacta, flexível e tem a menor pegada. ele pode trabalhar em coordenação com outros robôs industriais, mas tem baixa precisão de posição, problemas de equilíbrio e acoplamento de controle. Este tipo de robô industrial é usado cada vez mais
(5) Planar robô industrial tipo junta
usa uma articulação móvel e duas articulações rotativas (PRR), a articulação móvel realiza o movimento para cima e para baixo e as duas articulações rotativas controlam os movimentos frontal e traseiro, esquerdo e direito. Este forma de robô industrial também é conhecido como (SCARA (Seletive robô de montagem de conformidade Braço) montagem robô. é flexível na direção horizontal e tem grande rigidez na direção vertical. tem uma estrutura simples e movimentos flexíveis, e é principalmente usado para operações de montagem. é especialmente adequado para montagem plug-in de peças de pequeno porte, como plug-in e montagem na indústria eletrônica.
2. robôs industriais são divididos em as seguintes categorias de acordo com o modo de condução:
(1) robô industrial pneumático
Este tipo de robô industrial usa ar comprimido para acionar o manipulador. suas vantagens são fonte de ar conveniente, ação rápida, estrutura simples, baixo custo e sem poluição. A desvantagem é que o ar é compressível, resultando em baixa estabilidade de velocidade de trabalho. A pressão da fonte é geralmente de apenas cerca de 6 kPa, então a força de captura desse tipo de robô industrial é pequena, geralmente apenas dezenas de Newtons, e o máximo é maior do que 100 Newtons.
(2) robô industrial hidráulico
A pressão hidráulica é muito maior do que a pressão do ar, geralmente cerca de 70kPa, de modo que o robô industrial de transmissão hidráulica tem uma grande capacidade de snatch, que pode chegar a milhares de newtons. Este tipo de robô industrial tem estrutura compacta, transmissão suave e ação sensível, mas possui altos requisitos de vedação e não é adequado para trabalhar em ambientes de alta ou baixa temperatura.
(3) robô industrial elétrico
Este é o tipo de robô industrial mais utilizado, não só porque da grande variedade de motores elétricos, ele oferece uma variedade de opções para projetos de robôs industriais, mas também porque eles pode usar uma variedade de métodos de controle flexíveis. nos primeiros dias, os motores de passo eram usados para conduzir e, em seguida, as unidades de servo acionamento CC foram desenvolvidas. no momento, as unidades de servo acionamento ac também estão se desenvolvendo rapidamente. Estes as unidades de acionamento acionam diretamente o manipulador ou são acionadas após a desaceleração por meio de um dispositivo como um redutor harmônico. A estrutura é muito compacta e simples.
sistema de controle de robô industrial
A estrutura do sistema do robô consiste na configuração do robô parte de mecanismo, grupo de sensores, parte de controle e parte de processamento de informações O sistema de controle é uma parte essencial da indústria de robôs.
1. funções a serem alcançadas pelo sistema de controle do robô industrial
O sistema de controle do robô é usado para controlar o manipulador para concluir tarefas específicas. suas funções básicas são as seguintes:
(1) memória função:
armazenar sequência de trabalho, caminho de movimento, modo de movimento, velocidade de movimento e informações relacionadas ao processo de produção.
(2) ensino função:
Offline programação, ensino online, ensino indireto. o ensino online inclui caixa de ensino e ensino orientado.
(3) função de contacto com equipamento periférico:
interface de entrada e saída, interface de comunicação, interface de rede, interface de sincronização.
(4) definição de coordenadas função:
existem quatro sistemas de coordenadas: conjunto, absoluto, ferramenta e definido pelo usuário.
(5) Homem-máquina interface:
caixa de ensino, painel de operação, tela
(6) sensor interface:
detecção de posição, visão, toque, força, etc.
(7) posição servo função:
robô multi-eixo ligação, controle de movimento, controle de velocidade e aceleração, compensação dinâmica, etc.
(8) diagnóstico de falha proteção de segurança função:
monitoramento de status do sistema durante operação, proteção de segurança em condições de falha e autodiagnóstico de falha.
2. composição do sistema de controle de robô industrial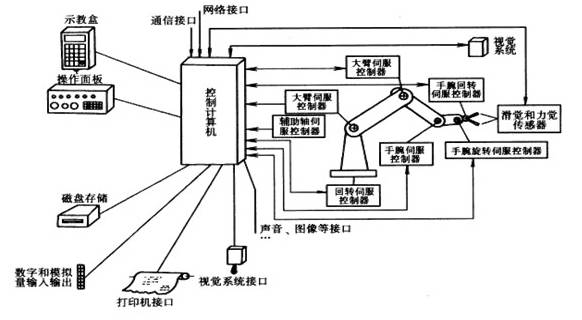
O diagrama de blocos do sistema de controle do robô
(1) controle computador:
A organização de envio e comando do sistema de controle. Geralmente, microcomputadores e microprocessadores são de 32 bits, 64 bits, etc., como Pentium série cpus e outros tipos de CPUs.
(2) caixa de ensino:
ensinar o robô trajetória de trabalho e configurações de parâmetros, bem como homem-computador interação, ter sua própria cpu independente e unidade de armazenamento, e realizar a interação de informações com o computador host por meio de comunicação serial.
(3) operação painel:
é composto de vários botões de operação e indicadores de status e só conclui as operações funcionais básicas.
(4) disco rígido e disquete armazenamento:
memória periférica para armazenamento de programas de trabalho de robôs.
(5) entrada e saída digital e analógica:
entrada ou saída de vários status e comandos de controle.
(6) interface da impressora:
registre várias informações que precisam ser geradas.
(7) sensor interface:
é usado para a detecção automática de informações para realizar o controle compatível do robô, geralmente sensores de força, toque e visão.
(8) eixo controlador:
completar a posição da junta do robô, controle de velocidade e aceleração
(9) equipamento auxiliar controlo:
é usado para controlar equipamentos auxiliares que cooperam com o robô, como garra posicionador, etc.
(10) comunicação interface:
realizar a troca de informações entre robôs e outros dispositivos, geralmente interfaces seriais, interfaces paralelas, etc.
(11) interface de rede
1) Ethernet interface: a comunicação direta no pc de vários ou únicos robôs pode ser realizada através de Ethernet, a taxa de transmissão de dados é de até 10Mbit / s, e o programa aplicativo pode ser programado diretamente no pc com funções de biblioteca do Windows, e o tcp / ip protocolo de comunicação pode ser suportado, carregar dados e programas em cada controlador de robô por meio da interface Ethernet.
2) Fieldbus interface: suporta uma variedade de fieldbus populares especificações, como dispositivo de rede, ab remoto I / O, Interbus-s, profibus-DP, M-NET, etc.
3. classificação de sistemas de controle de robôs industriais
(1) controle do programa sistema:
aplique uma certa função de controle regular a cada grau de liberdade e o robô pode realizar a trajetória espacial necessária.
(2) sistema de controle adaptativo:
Quando as condições externas mudam, a fim de garantir a qualidade exigida ou para melhorar a qualidade do controle com o acúmulo de experiência, o processo é baseado na observação do estado da máquina em operação e no erro do servo, para então ajustar os parâmetros do modelo não linear até o erro Até ele desaparece. A estrutura e os parâmetros desse sistema podem mudar automaticamente com o tempo e as condições.
(3) inteligência artificial Sistema:
é impossível compilar programas de movimento com antecedência, mas requer determinação em tempo real do efeito de controle com base na informação obtida do estado circundante durante o movimento.
modo drive: veja sistema de acionamento de robô industrial.
exercício método:
(4) ponto tipo:
requer que o robô controle com precisão a postura do efetor final, independentemente do caminho;
(5) faixa tipo:
requer que o robô se mova de acordo com a trajetória e a velocidade ensinada.
(6) controle ônibus:
sistema de controle de barramento de padrão internacional. usar barramento de padrão internacional como barramento de controle do sistema de controle, como VME, barramento MULTI, barramento STD, barramento de PC.
(7) controle de barramento personalizado sistema:
O autocarro definido e utilizado pelo próprio fabricante é usado como o barramento do sistema de controle.
(8) método de programação:
sistema de programação de configuração física. O operador define um interruptor de limite fixo para realizar a operação do programa de partida e parada, que só pode ser usada para operações simples de separação e colocação.
(9) online programação:
O método de programação do processo de memória de operação da informação é completado por meio do ensino humano, incluindo ensino direto (isto é ensino direto ensino) simulação de ensino e caixa de ensino ensino.
(10) Offline programação:
não ensine diretamente para o robô real, mas separe de o ambiente de trabalho real, gerar um programa de ensino e gerar a trajetória do robô remotamente offline usando robôs e linguagens de programação de alto nível.
4. estrutura do sistema de controle do robô
os sistemas de controle do robô podem ser divididos em três categorias de acordo com suas métodos de controle.
(1) sistema de controlo centralizado (Centralized control System): 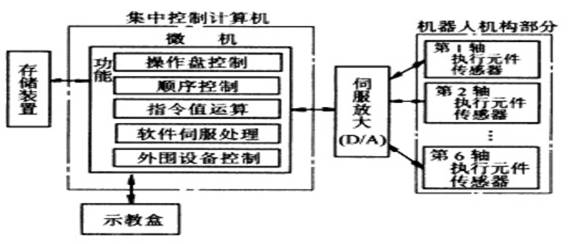
diagrama de blocos do sistema de controle centralizado
um computador é usado para realizar todas as funções de controle. A estrutura é simples e o custo é baixo, mas o desempenho em tempo real é ruim e difícil de expandir. Este estrutura é freqüentemente usada nos primeiros robôs. O diagrama de blocos é mostrado na figura.
O baseado em PC O sistema de controle centralizado aproveita ao máximo a abertura dos recursos do pc e pode alcançar boa abertura: uma variedade de placas de controle, dispositivos sensores, etc. podem ser integrados em o controle através do padrão PCI slots ou por meio de portas seriais padrão e portas paralelas. Sistema.
As vantagens dos sistemas de controle centralizado são: baixo custo de hardware, fácil coleta e análise de informações, fácil de obter o controle ideal do sistema, melhor integridade e coordenação e mais conveniente Baseado em PC expansão do hardware do sistema. suas deficiências também são óbvias: o controle do sistema carece de flexibilidade e o controle do perigo é fácil de concentrar. uma vez que ocorre uma falha, seu impacto é amplo e as consequências são graves; porque os requisitos em tempo real dos robôs industriais são muito altos, quando o sistema executa uma grande quantidade de cálculos de dados, ele reduzirá o desempenho em tempo real, o sistema capacidade de resposta a multitarefa também entrará em conflito com o sistema em tempo real desempenho; além disso, o sistema fiação complexa reduzirá o sistema confiabilidade.
(2) Mestre-escravo sistema de controle:
usando mestre e escravo dois níveis processadores para realizar todas as funções de controle do sistema. A cpu principal realiza o gerenciamento, a transformação de coordenadas, a geração de trajetórias e o autodiagnóstico do sistema, etc.; a CPU escrava realiza o controle de movimento de todas as juntas. seu diagrama de blocos de composição, conforme mostrado na figura.
O mestre-escravo sistema de controle tem bom desempenho em tempo real e é adequado para alta precisão e controle de alta velocidade, mas a escalabilidade do sistema é ruim e a manutenção é difícil.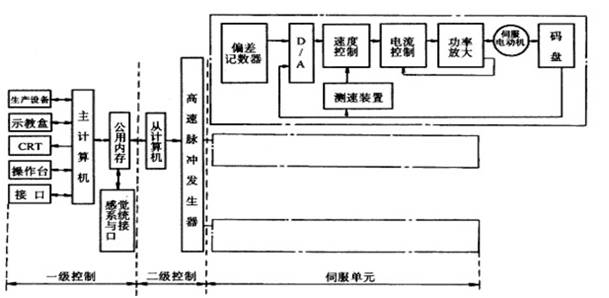
diagrama de blocos do sistema de controle mestre e escravo
(3) distribuir o controle Sistema:
de acordo com a natureza e o método do sistema, o controle do sistema é dividido em vários módulos. cada módulo possui diferentes tarefas e estratégias de controle. cada modo pode ser um mestre-escravo relacionamento ou um relacionamento de igualdade.
Este método tem bom desempenho em tempo real, é fácil de realizar em alta velocidade, alta precisão controle, é fácil de expandir e pode realizar um controle inteligente. é um método popular no momento.
A ideia principal é "controle descentralizado, gerenciamento centralizado", ou seja, o sistema pode coordenar e alocar de forma abrangente seus objetivos e tarefas gerais, e concluir as tarefas de controle por meio da coordenação de subsistemas. Todo o sistema é funcional, lógico e físico. ele é descentralizado, portanto, o sistema dcs também é chamado de sistema de controle distribuído ou sistema de controle distribuído.
nesta estrutura, o subsistema é composto por um controlador e diferentes objetos ou dispositivos controlados, e cada subsistema se comunica entre si por meio de uma rede. A estrutura de controle distribuída fornece um sistema de controle de robô aberto, em tempo real e preciso. Dois níveis os métodos de controle são freqüentemente usados em sistemas distribuídos.
Dois níveis sistema de controle distribuído, geralmente composto por computador superior, computador inferior e rede. O computador superior pode realizar diferentes planejamentos de trajetória e algoritmos de controle, e o computador inferior pode realizar a pesquisa e realização de interpolação e subdivisão e controle otimização. O computador superior e o computador inferior trabalham em coordenação um com o outro através do barramento de comunicação. O barramento de comunicação aqui pode ser no formato RS-232, RS-485, EEE-488 e USB ônibus.
Agora, o desenvolvimento de ethernet e fieldbus a tecnologia fornece aos robôs serviços de comunicação mais rápidos, estáveis e eficazes. especialmente o barramento de campo, que é aplicado ao local de produção para realizar dois nós comunicação digital entre microcomputerizados equipamento de medição e controle, formando assim um novo tipo de rede integrada de controle totalmente distribuído sistema de campo sistema de controle de barramento fcs (Arquivado controle de barramento Sistema) ).
na rede de produção da fábrica, os dispositivos que podem ser conectados via fieldbus são coletivamente denominados "dispositivos / instrumentos de campo". De Na perspectiva da teoria dos sistemas, os robôs industriais, como um dos equipamentos de produção da fábrica, também podem ser resumidos como equipamentos de campo. após a introdução do fieldbus tecnologia no sistema de robô, é mais propício para a integração de robôs no ambiente de produção industrial.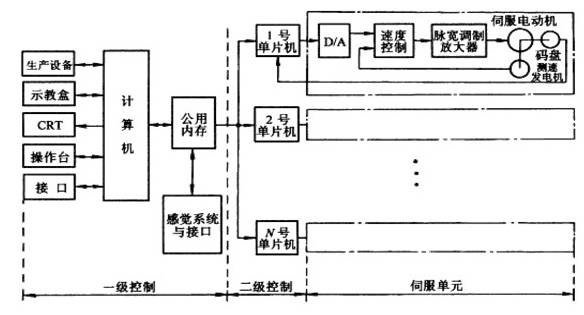
diagrama de blocos do sistema de controle distribuído
As vantagens do sistema de controle distribuído são: a flexibilidade do sistema é boa, o risco do sistema de controle é reduzido, o uso de multi-processador o controle distribuído conduz à execução paralela das funções do sistema, a eficiência de processamento do sistema é aprimorada e o tempo de resposta é reduzido.
Para robôs industriais com vários graus de liberdade, controle centralizado lida muito bem com a relação de acoplamento entre cada eixo de controle e pode ser facilmente compensado. No entanto, quando o número de eixos aumenta para tornar o algoritmo de controle muito complicado, seu desempenho de controle se deteriorará. Além disso, quando o número de eixos no sistema ou o algoritmo de controle torna-se muito complicado, podendo levar ao redesenho do sistema. em contraste, cada eixo de movimento da estrutura distribuída é processado por um controlador, o que significa que o sistema tem menos acoplamento entre os eixos e maior reconfiguração do sistema.
"Indústria 4.0" refere-se à quarta revolução industrial depois da máquina a vapor, eletrificação e automação. ele combina a indústria tradicional com a tecnologia da informação digital e realiza uma produção inteligente com a ajuda de tecnologias como big data e computação em nuvem. na China, "Indústria 4.0" significa a valorização do país manufatura indústria. Para Por esse motivo, a China apresentou especificamente a meta de desenvolvimento de "Fabricado na China 2025". O objetivo é mudar de um grande país manufatureiro para um país manufatureiro forte até 2025.

TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.
















continue lendo, mantenha-se informado, inscreva-se, e nós o convidamos a nos dizer o que você pensa.
 IPv6 rede suportada 粤ICP备2021036697号-1
IPv6 rede suportada 粤ICP备2021036697号-1 Serviço on-line
Serviço on-line 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com gfreex@hotmail.com
gfreex@hotmail.com Felix
Felix 8936906
8936906 Troysupply_com
Troysupply_com