 português
português English
English français
français Deutsch
Deutsch русский
русский español
español العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt



ligue-nos agora
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.

um robô industrial é uma multi-junta manipulador ou um multi-grau-de-liberdade dispositivo de máquina orientado para o campo industrial. pode executar trabalho automaticamente e é uma máquina que conta com sua própria energia e recursos de controle para realizar várias funções. pode ser comandado por humanos e também pode ser executado de acordo com pré-arranjado programas. robôs industriais modernos também podem executar tarefas de acordo com princípios e diretrizes estabelecidas pela tecnologia de inteligência artificial.

O primeiro robô industrial em conformidade com a ISO padrão foi produzido por bill griffith taylor em 1937 e publicado na revista meccano em março 1938. Este tipo guindaste robô industrial é feito de peças meccano e movido por um único motor elétrico. Este robô industrial pode empilhar blocos de madeira em um pré-programado maneira.


▲ george Davor
a robótica é uma multidisciplinar campo que reúne os campos da mecânica, eletrônica, informática, controle, inteligência artificial, física e matemática. os robôs industriais são compostos por seis componentes básicos: unidades dinâmicas, fim do braço máquinas, controladores de computador digital, atuadores, dispositivos de entrada e detectores.


▲ robô industrial abb concluiu o "Fanta Tanque" desafio
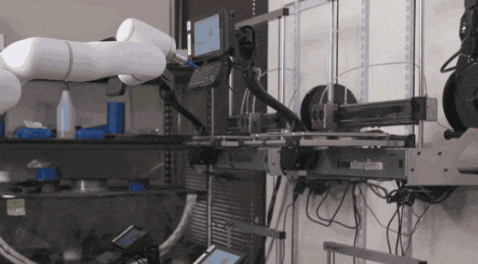
articulado configuração: O braço articulado é o braço robótico mais comum, muito semelhante a um braço humano. geralmente seis eixos máquinas, eles fornecer redundância e mover de forma mais suave.
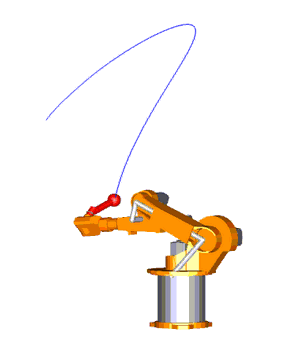
▲ configuração de junta articulada

▲ SCARA configuração configuração conjunta
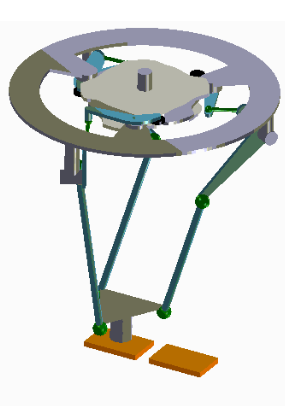
▲ robô industrial paralelo
um mecanismo paralelo pode ser definido como um loop fechado mecanismo no qual a plataforma móvel e a plataforma fixa são conectadas por pelo menos duas cinemáticas correntes, o mecanismo tem dois ou mais graus de liberdade e é acionado em paralelo.
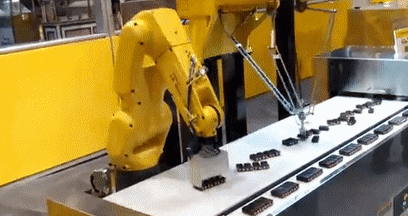
as aplicações típicas de robôs industriais incluem soldagem, pintura, montagem, coleta e colocação (como embalagem, paletização e SMT), inspeção e teste de produto, etc.; todas as tarefas são concluídas com alta eficiência, durabilidade, velocidade e precisão.
para realizar tarefas de trabalho com mais precisão, os robôs industriais geralmente incluem subsistemas de visão de máquina como sensores de visão, conectados a computadores ou controladores poderosos. Para robôs industriais modernos, robôs de inteligência artificial tornaram-se equipamentos cada vez mais importantes.

TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.
















continue lendo, mantenha-se informado, inscreva-se, e nós o convidamos a nos dizer o que você pensa.
 IPv6 rede suportada 粤ICP备2021036697号-1
IPv6 rede suportada 粤ICP备2021036697号-1 Serviço on-line
Serviço on-line 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com gfreex@hotmail.com
gfreex@hotmail.com Felix
Felix 8936906
8936906 Troysupply_com
Troysupply_com