 português
português English
English français
français Deutsch
Deutsch русский
русский español
español العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt


ligue-nos agora
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.


características
Item número.:
AR4215Forma de pagamento:
FOBOrigem do produto:
ChinaCor:
whitePorto de embarque:
ShenZhen portsTempo de espera:
20 days
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.
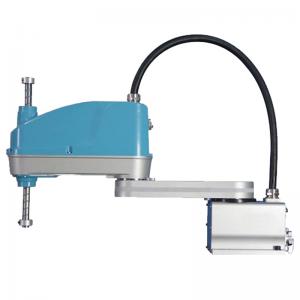
High velocidade e precisão SCARA robô
Especificações:
Programação: AR, linguagem de programação de código g
bater mais rápido velocidade: 0,38 s
Precisão: menos do que 0,02 milímetros
Aplicação: velocidade online para seguir
Recursos:
Aplicação:
adequado para PCBA plugue, manuseio, classificação visual, montagem, aparafusamento, carregamento, transporte, máquina de plug-in, soldagem e outros indústrias --- indústria eletrônica e alimentícia .
desempenho Benchmark - Parâmetro:
nome do modelo | ADT | TOSHIBA | EPSON | YAMAHA | ||
AR4215 | THL400 | LS3-401 | YK400XG-150 | |||
características do produto | Alta velocidade, alta precisão, alto custo-benefício | baixo custo, peso leve, energia | Alta velocidade, alta precisão, alto custo-benefício | máquina econômica | ||
especificação do eixo | eixo x | comprimento do braço | 200mm | 225mm | 225mm | 250mm |
faixa de rotação | ± 127 ° | ± 125 ° | ± 132 ° | ± 140 ° | ||
eixo y | comprimento do braço | 200mm | 200mm | 175mm | 150mm | |
faixa de rotação | ± 142 ° | ± 145 ° | ± 141 ° | ± 144 ° | ||
eixo z | rota | 150mm | 160mm | 150mm | 150mm | |
eixo r | faixa de rotação | ± 360 ° | ± 360 ° | ± 360 ° | ± 360 ° | |
velocidade mais alta | eixo x | 600 ° / S | 660 ° / S |
|
| |
eixo y | 375 ° / S | 660 ° / S |
|
| ||
Síntese do eixo X, y | 5,5 m / s | 6,3 m / s | 6m / s | 6,1 m / s | ||
eixo z | 1,3 m / s | 1,2 m / s | 1,1 m / s | 1,1 m / s | ||
eixo r | 1667 ° / s | 1500 ° / s | 2600 ° / s | 1020 ° / s | ||
repetir precisão de posicionamento | Eixo X, y | ± 0,01 mm | ± 0,01 mm | ± 0,01 mm | ± 0,01 mm | |
eixo z | ± 0,01 mm | ± 0,015 mm | ± 0,01 mm | ± 0,01 mm | ||
eixo r | ± 0,005 ° | ± 0,007 ° | ± 0,01 ° | ± 0,004 ° | ||
tempo de ciclo padrão | 0.45s | 0,47 | 0.42s | 0,49 | ||
avaliado / carregamento máximo | 2Kg / 5kg | 2Kg / 5kg | 1Kg / 3kg | 5kg | ||
eixo r permite o momento de inércia da carga (Rated / max) | 0,01 kg · m2 | 0,05 kg · m2 | 0,05 kg · m2 | 0,05 kg · m2 | ||
0,04 kg · m2 | 0,005 kg · m2 | |||||
linha de sinal do usuário | 0.2sq × 16 linhas | 8 entradas / 8 saídas | 0,15sq × 15 linhas | 0,2sq × 10 linhas | ||
6 entradas / 8 saídas | ||||||
traqueia de usuários | Ф6 × 2 | φ4 × 3 | φ4 × 1 | φ4 × 3 | ||
Ф6 × 2 | ||||||
proteção de limite | 1, o limite de software | 1, o limite de software | 1, o limite de software | 1, o limite de software | ||
2, o limite mecânico (eixo X, Y, z ) | 2, o limite mecânico (eixo X, Y, z ) | 2, o limite mecânico (eixo X, Y, z ) | 2, o limite mecânico (eixo X, Y, z ) | |||
peso | 13Kg | 13Kg | 14Kg | 19Kg | ||
movimento espaço:
seleção Destaques:
1. âmbito do trabalho: comprimento do braço do robô, alcance operacional
2. Carregar: pinça design, a inércia o mais baixa possível
3. Precisão: repetir precisão de posicionamento
4. A batida de trabalhar: tempo de ciclo de ação, tempo de consumo de gás ação
5.I / o pontos: pontos universais de entrada e saída
6. visual pacote: rastreamento estático, rastreamento dinâmico
7. Comunicação: i / O, rede, serial

ADTECH 4 eixos SCARA braço robótico com alto desempenho e excelente precisão.

fabricante de robô industrial na China com preço barato ADTECH FR5215 sistema 5500mm comprimento do braço 4 eixos de elevação scara robô com visão avs sistema. ADTECH é profissional em 4 eixos Scara robô P&D, produção e serviço. Para reduzir produtos pessoas custo.cada vez mais o robô é usado na produção line.ADTECH scara o robô pode substituir NACHI, TOSHIBA, etc.marca do Japão, é um aplicativo para PCBA montagem, aparafusamento carregamento, embalagem, etc. campo elétrico.
OEM Scara robôs são projetados para a fábrica com a montagem de componentes elétricos, como Samsung, Foxconn, LG e canon etc.

TR600B quatro eixos SCARA robô industrial O robô é uma multi-junta quatro eixos robô com direitos de propriedade independentes completos adota um controlador de alto desempenho para controlar o robô para obter movimento de ponto de alta velocidade, movimento de interpolação linear espacial, interpolação de arco espacial e outras funções. é adequado para transporte, várias ocasiões industriais, como carga e descarga, soldagem por pontos, colagem, etc.

processamento de metais indústria: corte em máquinas de perfuração, CNC carga e descarga, retificação de peças, rebarbação;produtos eletrônicos indústria: montagem, teste e manuseio de chips ic, soldagem por pontos, PCBA soldagem, aplicação de cola, aparafusamento, encaixe, peça de trabalho peças para automóveis e motociclos indústria: manuseio, colagem, soldagem por pontos LCD / LED e vidro indústria: manuseio de placas de vidro, montagem de módulos lcm, manuseio de pastilhas de silício e telas de exibição laser indústria: soldagem por pontos, corte;eletrodomésticos indústria: montagem, manuseamento e aparafusamento de electrodomésticos produtos;pesquisa áreas: ensino do aluno, pesquisa e desenvolvimento escolar.

TR800B quatro eixos SCARA industrial Robô: O robô é uma multi-junta quatro eixos robô com direitos de propriedade independentes completos de LBD. ele usa um controlador de alto desempenho para controlar o robô para obter movimento de ponto de alta velocidade, movimento de interpolação linear espacial, interpolação de arco espacial e outras funções.é adequado para manuseio, carga e descarga., soldagem por pontos, colagem e outras ocasiões industriais.

O SCARA multi-junta manipulador pertence à empresa robôs de alta precisão, alta velocidade e alto desempenho. Este produto é voltado principalmente para a aplicação de parafusos de bloqueio do robô no 3C indústria. Este produto é desenvolvido com base no modelo SCARA corpo do robô com 600 braço comprimentos.um especial não padronizado robô para bloqueio de parafusos com função de posicionamento visual.

Série Yaskawa Scara Robot SOC: A série MOTOMAN-SOC é um robô SCARA especialmente construído para operações em alta velocidade. É adequado para vários cenários, como montagem, transporte, embalagem, classificação e inspeção de peças pequenas.

robôs delta confiáveis e de alta velocidade abastecimento. É construir com panasonic servos. suporta câmera de visão em linhas de produção

4 eixos delta Robôs / Aranha robôs são adequados para a indústria de embalagens de alimentos.O sistema de visão do robô está disponível também !

Os robôs delta de 4 eixos são projetados para embalagens de alimentos nas linhas de produção. como fabricantes de chocolates, biscoitos e pães.

aranha delta industrial Robô: 400mm-1200mm diâmetro de trabalho 1-3kg avaliado carga útil KEBA ensinar pingente

Robô Aranha Delta Industrial: Diâmetro de trabalho de 400mm-1200mm Carga útil nominal de 1-3kg Pingente de ensino KEBA

* Os robôs Delta são econômicos, de alta qualidade e baixo custo, podem ser personalizados com design OEM para os clientes e suportam várias informações do sensor visual; * O sistema de aplicação do robô TRD é composto principalmente de três partes: robô, alimentação de arame e estrutura de instalação do robô. O robô consiste em um substrato, uma tampa do motor, um eixo rotativo, um braço principal do robô; é composto de braço mecânico auxiliar e centro de pinça.

O robô delta é uma configuração clássica de robô paralelo.tem as características de XYZ tridimensional translação e rotação em torno do eixo z .ele tem as vantagens de velocidade rápida, boa precisão, alta confiabilidade, grande facilidade de uso e baixo custo de manutenção.é amplamente utilizado em campos de classificação e embalagem em alta velocidade.

* Produto vantagens: velocidade rápida, alta precisão * Longo vida útil e desempenho estável * Forte compatibilidade e forte flexibilidade * Simples controle e facilidade de uso

*Vantagens do robô: velocidade rápida, alta precisão *Longa vida útil e desempenho estável *Forte compatibilidade e forte flexibilidade *Controle simples e facilidade de uso



















continue lendo, mantenha-se informado, inscreva-se, e nós o convidamos a nos dizer o que você pensa.
 IPv6 rede suportada 粤ICP备2021036697号
IPv6 rede suportada 粤ICP备2021036697号 Serviço on-line
Serviço on-line 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com